STM32中断
概述:
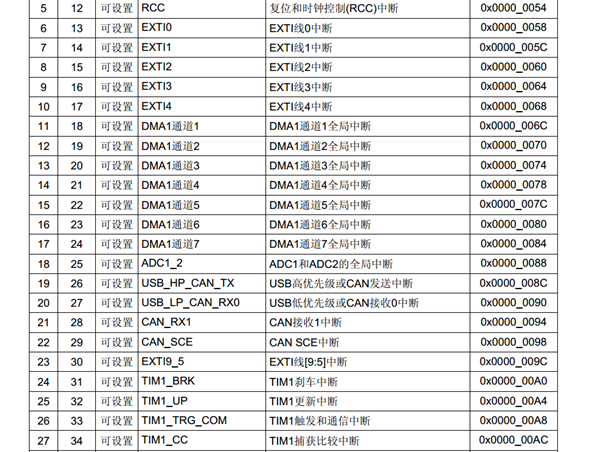
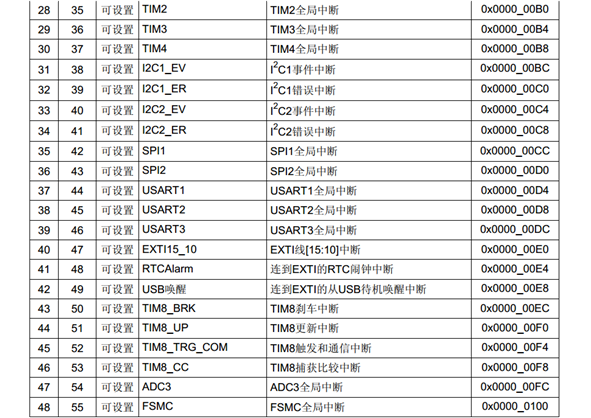
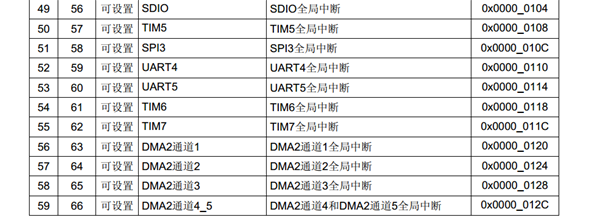
1、包括68个可屏蔽中断通道,包含EXTI、TIM、ADC、USART、SPI、I2C、RTC等多个外设
2、使用NVIC统一管理中断,每个中断通道都拥有16个可编程的优先等级,可对优先级进行分组,进一步设置抢占优先级和响应优先级
3、分布图:
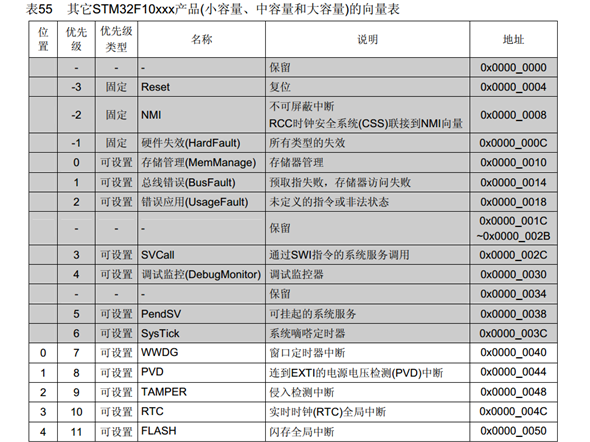
- 其中灰色的是内核中断,比较高深一般不用。
- WWDG为看门狗中断,用来检测程序运行状态的中断,比如程序卡死会跳入这个中断。、
- PVD中断,发现电压不足时进入该中断。
- 其中EXTI1~EXTI4 、EXTI9_5、EXTI5_10都是外部中断。
- 后面地址,是中断跳转的地址
NVIC:
作用:
1、用于分配中断优先级。
NVIC优先级分组:
NVIC的中断优先级由优先级寄存器的4位(0~15)决定(值越小中断优先级越高),这4位可以进行切分,分为高n位的抢占优先级和低4-n位的响应优先级。
抢占优先级高的可以中断嵌套(特别紧急可以打断正在看病的病人),响应优先级高的可以优先排队(紧急但不是非常紧急的,优先排队等正在看的开完后立刻进去看),抢占优先级和响应优先级均相同的按中断号(上表中的第一列的号码)排队。
我们可选的分组方式:
分组方式 抢占优先级 响应优先级 分组0 0位,取值为0 4位,取值为0~15 分组1 1位,取值为0~1 3位,取值为0~7 分组2 2位,取值为0~3 2位,取值为0~3 分组3 3位,取值为0~7 1位,取值为0~1 分组4 4位,取值为0~15 0位,取值为0
1、EXIT外部中断
1、概述:
1、作用:•EXTI(Extern Interrupt)外部中断:EXTI可以监测指定GPIO口的电平信号,当其指定的GPIO口产生电平变化时,EXTI将立即向NVIC发出中断申请,经过NVIC裁决后即可中断CPU主程序,使CPU执行EXTI对应的中断程序
2、支持的触发方式:上升沿/下降沿/双边沿(上升和下降沿都触发)/软件触发(引脚啥事没有,程序执行一句代码进行中断)
3、支持的GPIO口:所有GPIO口,但相同的Pin不能同时触发中断。如:GPIOA0、GPIOB0、GPIOC0这几个的Pin都为0只能选A、B、C其中一个用于EXTI,不能同时使用。原因是:AFIO中断引脚选择作用的结果。
4、通道数:16个GPIO_Pin,外加PVD输出、RTC闹钟、USB唤醒、以太网唤醒 (20个,主要学习16个引脚的)
5、触发响应方式:中断响应(执行中断函数)/事件响应(触发事件用于触发其他外设)
6、基本结构:
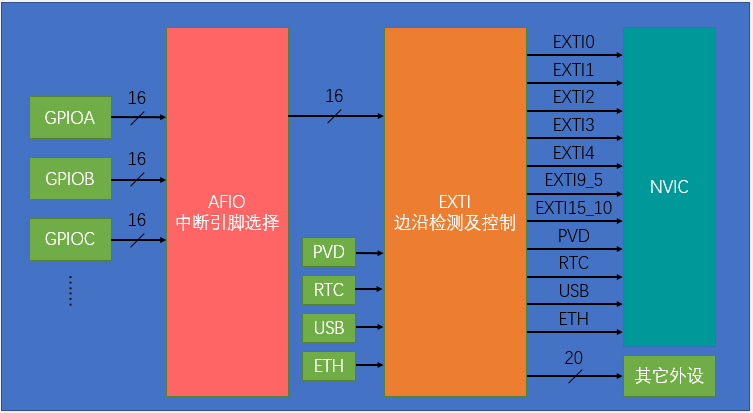
- 防止太占用NVIC就把EXTI9
~EXTI5放入了一个通道,把EXTI15~EXTI10放入了同一个通道。 - 右下角20路到其他外设就是用于上述事件响应。
2、红外计次
1、对设式红外传感器:
- 被遮挡D0输出0,未遮挡输出1
2、外部中断配置:
- 通过基本结构图来配置:
1、配置RCC:
把涉及到的引脚时钟打开。
2、配置GPIO
把端口设置为输入模式。
可以去参考手册8.1.11看外设的GPIO配置表。
EXTI输入线: 外部中断输入 浮空输入或带上拉输入或带下拉输入
3、配置AFIO:
把我们用到的那一路GPIO连接到后面的EXTI
void GPIO_AFIODeInit(void);//用于复位AFIO
void GPIO_PinLockConfig(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);//用于锁定GPIO配置,防止意外更改
void GPIO_EventOutputConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource);//用于配置AFIO事件输出功能(不常用)
void GPIO_EventOutputCmd(FunctionalState NewState);//用于配置AFIO事件输出功能(不常用)
void GPIO_PinRemapConfig(uint32_t GPIO_Remap, FunctionalState NewState);//用于引脚重映射,GPIO_Remap:为重映射的方式,NewState:新的状态(重要)
void GPIO_EXTILineConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource);//配置AFIO的数据选择器,来选择我们想要中断的引脚(重要)
void GPIO_ETH_MediaInterfaceConfig(uint32_t GPIO_ETH_MediaInterface);//关于以太网(用不到)本次主要用void GPIO_EXTILineConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource);
/**
* @brief Selects the GPIO pin used as EXTI Line.配置AFIO的数据选择器,来选择我们想要中断的引脚(重要)
* @param GPIO_PortSource: selects the GPIO port to be used as source for EXTI lines.
* This parameter can be GPIO_PortSourceGPIOx where x can be (A..G).参数1,为GPIO_PortSourceGPIOx (x为A到G)
* @param GPIO_PinSource: specifies the EXTI line to be configured.
* This parameter can be GPIO_PinSourcex where x can be (0..15).参数2:为GPIO_PinSourcex(x为0到15的pin值)
* @retval None
*/
void GPIO_EXTILineConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource)
{
uint32_t tmp = 0x00;
/* Check the parameters */
assert_param(IS_GPIO_EXTI_PORT_SOURCE(GPIO_PortSource));
assert_param(IS_GPIO_PIN_SOURCE(GPIO_PinSource));
tmp = ((uint32_t)0x0F) << (0x04 * (GPIO_PinSource & (uint8_t)0x03));
AFIO->EXTICR[GPIO_PinSource >> 0x02] &= ~tmp;
AFIO->EXTICR[GPIO_PinSource >> 0x02] |= (((uint32_t)GPIO_PortSource) << (0x04 * (GPIO_PinSource & (uint8_t)0x03)));
}4、配置EXTI:
选择触发方式(上升沿、下降沿、双边沿),选择触发方式,是中断响应还是事件响应。
关于EXTI的函数:
void EXTI_DeInit(void);//把EXTI的配置都清除,恢复成上电的默认状态
void EXTI_Init(EXTI_InitTypeDef* EXTI_InitStruct);//通过结构体EXTI_InitStruct初始化EXTI外设(重要)
void EXTI_StructInit(EXTI_InitTypeDef* EXTI_InitStruct);//可以个参数传递的结构体变量赋一个默认值
void EXTI_GenerateSWInterrupt(uint32_t EXTI_Line);//软件触发外部中断,EXTI_Line:中断线
//在主函数用
FlagStatus EXTI_GetFlagStatus(uint32_t EXTI_Line);//可以获取指定的标志位是否被置1
void EXTI_ClearFlag(uint32_t EXTI_Line);//可以对被置1的标志位进行清除
//在中断函数中用
ITStatus EXTI_GetITStatus(uint32_t EXTI_Line);//可以在中段函数里获取指定的标志位是否被置1
void EXTI_ClearITPendingBit(uint32_t EXTI_Line);//可以在中段函数里对被置1的标志位进行清除EXTI_Lines :
/** @defgroup EXTI_Lines
* @{
*/
#define EXTI_Line0 ((uint32_t)0x00001) /*!< External interrupt line 0 */
#define EXTI_Line1 ((uint32_t)0x00002) /*!< External interrupt line 1 */
#define EXTI_Line2 ((uint32_t)0x00004) /*!< External interrupt line 2 */
#define EXTI_Line3 ((uint32_t)0x00008) /*!< External interrupt line 3 */
#define EXTI_Line4 ((uint32_t)0x00010) /*!< External interrupt line 4 */
#define EXTI_Line5 ((uint32_t)0x00020) /*!< External interrupt line 5 */
#define EXTI_Line6 ((uint32_t)0x00040) /*!< External interrupt line 6 */
#define EXTI_Line7 ((uint32_t)0x00080) /*!< External interrupt line 7 */
#define EXTI_Line8 ((uint32_t)0x00100) /*!< External interrupt line 8 */
#define EXTI_Line9 ((uint32_t)0x00200) /*!< External interrupt line 9 */
#define EXTI_Line10 ((uint32_t)0x00400) /*!< External interrupt line 10 */
#define EXTI_Line11 ((uint32_t)0x00800) /*!< External interrupt line 11 */
#define EXTI_Line12 ((uint32_t)0x01000) /*!< External interrupt line 12 */
#define EXTI_Line13 ((uint32_t)0x02000) /*!< External interrupt line 13 */
#define EXTI_Line14 ((uint32_t)0x04000) /*!< External interrupt line 14 */
#define EXTI_Line15 ((uint32_t)0x08000) /*!< External interrupt line 15 */
#define EXTI_Line16 ((uint32_t)0x10000) /*!< External interrupt line 16 Connected to the PVD Output */
#define EXTI_Line17 ((uint32_t)0x20000) /*!< External interrupt line 17 Connected to the RTC Alarm event */
#define EXTI_Line18 ((uint32_t)0x40000) /*!< External interrupt line 18 Connected to the USB Device/USB OTG FS
Wakeup from suspend event */
#define EXTI_Line19 ((uint32_t)0x80000) /*!< External interrupt line 19 Connected to the Ethernet Wakeup event */
#define IS_EXTI_LINE(LINE) ((((LINE) & (uint32_t)0xFFF00000) == 0x00) && ((LINE) != (uint16_t)0x00))
#define IS_GET_EXTI_LINE(LINE) (((LINE) == EXTI_Line0) || ((LINE) == EXTI_Line1) || \
((LINE) == EXTI_Line2) || ((LINE) == EXTI_Line3) || \
((LINE) == EXTI_Line4) || ((LINE) == EXTI_Line5) || \
((LINE) == EXTI_Line6) || ((LINE) == EXTI_Line7) || \
((LINE) == EXTI_Line8) || ((LINE) == EXTI_Line9) || \
((LINE) == EXTI_Line10) || ((LINE) == EXTI_Line11) || \
((LINE) == EXTI_Line12) || ((LINE) == EXTI_Line13) || \
((LINE) == EXTI_Line14) || ((LINE) == EXTI_Line15) || \
((LINE) == EXTI_Line16) || ((LINE) == EXTI_Line17) || \
((LINE) == EXTI_Line18) || ((LINE) == EXTI_Line19))EXTI_LineCmd: ENABLE or DISABLE
EXTI_Mode:
typedef enum
{
EXTI_Mode_Interrupt = 0x00,//中断模式
EXTI_Mode_Event = 0x04//事件模式
}EXTIMode_TypeDef;EXTI_Trigger:
typedef enum
{
EXTI_Trigger_Rising = 0x08,//上升沿
EXTI_Trigger_Falling = 0x0C, //下降沿
EXTI_Trigger_Rising_Falling = 0x10//双边沿
}EXTITrigger_TypeDef;5、配置NVIC
给中断选择合适的优先级。
关于NVIC的函数:
void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup);//用于中断分组,NVIC_PriorityGroup:中断分组的方式
void NVIC_Init(NVIC_InitTypeDef* NVIC_InitStruct);//初始化
//不常用
void NVIC_SetVectorTable(uint32_t NVIC_VectTab, uint32_t Offset);//设置中断向量表
void NVIC_SystemLPConfig(uint8_t LowPowerMode, FunctionalState NewState);//系统低功耗配置/**
* @brief Configures the priority grouping: pre-emption (抢占优先级)priority and subpriority.(响应优先级)
* @param NVIC_PriorityGroup: specifies the priority grouping bits length.
* This parameter can be one of the following values:
* @arg NVIC_PriorityGroup_0: 0 bits for pre-emption priority
* 4 bits for subpriority
* @arg NVIC_PriorityGroup_1: 1 bits for pre-emption priority
* 3 bits for subpriority
* @arg NVIC_PriorityGroup_2: 2 bits for pre-emption priority
* 2 bits for subpriority
* @arg NVIC_PriorityGroup_3: 3 bits for pre-emption priority
* 1 bits for subpriority
* @arg NVIC_PriorityGroup_4: 4 bits for pre-emption priority
* 0 bits for subpriority
* @retval None
*/
void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup)NVIC_InitTypeDef NVIC_InitStructure结构体配置
NVIC_IRQChannel//中断源配置
#ifdef STM32F10X_MD
ADC1_2_IRQn = 18, /*!< ADC1 and ADC2 global Interrupt */
USB_HP_CAN1_TX_IRQn = 19, /*!< USB Device High Priority or CAN1 TX Interrupts */
USB_LP_CAN1_RX0_IRQn = 20, /*!< USB Device Low Priority or CAN1 RX0 Interrupts */
CAN1_RX1_IRQn = 21, /*!< CAN1 RX1 Interrupt */
CAN1_SCE_IRQn = 22, /*!< CAN1 SCE Interrupt */
EXTI9_5_IRQn = 23, /*!< External Line[9:5] Interrupts */
TIM1_BRK_IRQn = 24, /*!< TIM1 Break Interrupt */
TIM1_UP_IRQn = 25, /*!< TIM1 Update Interrupt */
TIM1_TRG_COM_IRQn = 26, /*!< TIM1 Trigger and Commutation Interrupt */
TIM1_CC_IRQn = 27, /*!< TIM1 Capture Compare Interrupt */
TIM2_IRQn = 28, /*!< TIM2 global Interrupt */
TIM3_IRQn = 29, /*!< TIM3 global Interrupt */
TIM4_IRQn = 30, /*!< TIM4 global Interrupt */
I2C1_EV_IRQn = 31, /*!< I2C1 Event Interrupt */
I2C1_ER_IRQn = 32, /*!< I2C1 Error Interrupt */
I2C2_EV_IRQn = 33, /*!< I2C2 Event Interrupt */
I2C2_ER_IRQn = 34, /*!< I2C2 Error Interrupt */
SPI1_IRQn = 35, /*!< SPI1 global Interrupt */
SPI2_IRQn = 36, /*!< SPI2 global Interrupt */
USART1_IRQn = 37, /*!< USART1 global Interrupt */
USART2_IRQn = 38, /*!< USART2 global Interrupt */
USART3_IRQn = 39, /*!< USART3 global Interrupt */
EXTI15_10_IRQn = 40, /*!< External Line[15:10] Interrupts */
RTCAlarm_IRQn = 41, /*!< RTC Alarm through EXTI Line Interrupt */
USBWakeUp_IRQn = 42 /*!< USB Device WakeUp from suspend through EXTI Line Interrupt */
#endif /* STM32F10X_MD */NVIC_IRQChannelPreemptionPriority//抢占优先级
NVIC_IRQChannelSubPriority//响应优先级
如果选的是分组2,则这两个的值都为0到3
| 分组方式 | 抢占优先级 | 响应优先级 |
|---|---|---|
| 分组0 | 0位,取值为0 | 4位,取值为0~15 |
| 分组1 | 1位,取值为0~1 | 3位,取值为0~7 |
| 分组2 | 2位,取值为0~3 | 2位,取值为0~3 |
| 分组3 | 3位,取值为0~7 | 1位,取值为0~1 |
| 分组4 | 4位,取值为0~15 | 0位,取值为0 |
NVIC_IRQChannelCmd : ENABLE or DISABLE 是否使能
3、代码
#include "stm32f10x.h" // Device header
#include "Delay.h"
uint16_t CountSensor_Count;
void CountSensor_Init(void)
{
//配置时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//开启AFIO的时钟他也属于APB2
//EXTI和NVIC外设,时钟一直处于打开状态
//配置GPIO
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
//配置AFIO
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource14);
//配置EXTI
EXTI_InitTypeDef EXTI_InitStruct;
EXTI_InitStruct.EXTI_Line = EXTI_Line14 ;
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStruct.EXTI_LineCmd = ENABLE;
EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Rising;
EXTI_Init(&EXTI_InitStruct);
//配置NVIC
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//整个工程分一次组就行
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
uint16_t CountSensor_Get(void)
{
return CountSensor_Count;
}
//中断函数的名字都是固定的,可以在stratup_stm32f10x_md.s中查看IRQHandler结尾的
void EXTI15_10_IRQHandler(void)
{
//判断进来的是否为EXTI14
if(EXTI_GetITStatus(EXTI_Line14) == SET)
{
CountSensor_Count++;
//清除中断标志位
EXTI_ClearITPendingBit(EXTI_Line14);
}
}注意:
- 不要在中断函数中执行时间过长的函数,比如delay啥的
- 不要在中断函数和主函数执行相同的函数,如两个都调用Oled也容易引起显示错误或乱码
3、旋转编码器
1、旋转编码器:
可以测速度和旋转方向,方向可以通过看B的方波是比A提前90度还是滞后90度。